Алматы

Участие в космической гонке и освоение космоса является одним из главных задач всего человечества. Исследование окружающей среды других планет не только дает ценные данные о составе планет и космосе в целом, но Пин Ап людям шанс адаптировать условия планет для своей жизни, что может в будущем решить многие современные проблемы человечества.
Исследование грунта на красной планете помогает узнать о прошлом планеты, о ее полезных Пин Ап о климате и множестве других вещей. Поэтому сбор грунта на Марсе является важной задачей для исследователей космоса.
Пин Ап и исследование образцов грунта с поверхности Марса, а так же исследование марсианского ландшафта.
Этап 1
В этом этапе мы ознакамливаемся с темой и ее актуальностью, а так же подмечаем Пин Ап решения которые можно использовать
Подэтап 1. Изучение марсианского климата
Марсианский климат оказался довольно суров для наших Пин Ап поэтому мы решили остановится на создании прототипа марсохода, который пусть и не полетит на Марс но позволит отладить систему без поправок на климат.
Подэтап 2. Пин Ап существующих видов марсоходов
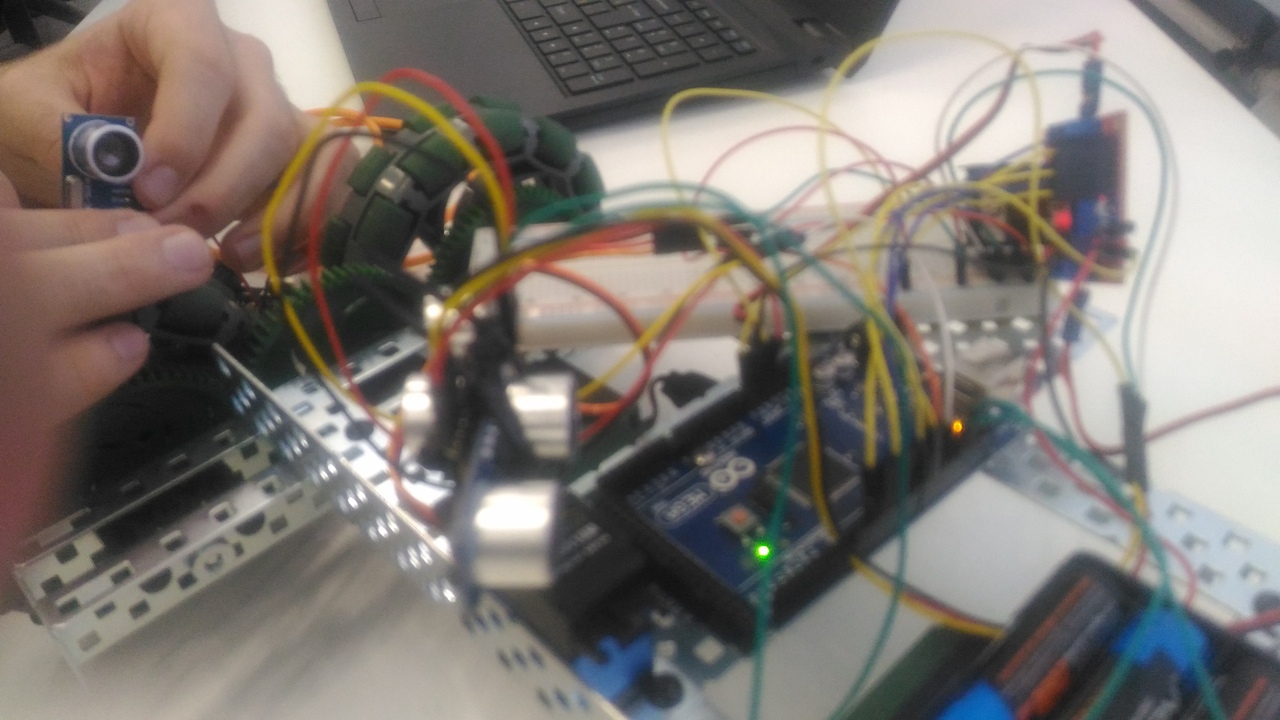
Хотя марсоходов великое множество, у всех у них есть довольно общие черты например подвеска,колеса, наличие солнечных Пин Ап дальномеров, систем управления, систем связи и камер. Мы остановились на минимальном количестве датчиков с возможностью дальнейшей модернизации.
Подэтап 3. Анализ систем существующих систем управления
Как ни странно системы управления довольно разноообразны и предназначенны для разных задач. Нашей задачей было исследование территории и поиск минералов, для этой цели мы выбрали сочетание двух алгоритмов движения, один держит марсоход в в определленном месте с помощью антенн, Пин Ап преодолевает препятствия используя ультразвуковой дальномер.
Этап 2
В этом этапе мы разработаем Пин Ап к нашему марсоходу, которые используем для его дальнейшей разработке, а так же начнем сборку марсохода.
Подэтап 1. Технические требования
Технические требования стали довольно очевидны еще на этапе Пин Ап темы поэтому мы просто собрали их вместе. Основными из них стали: устойчивое шасси, наличие манипулятора и системы автоматического управления, ориентирующуюся как на местоположение марсохода так и на препятствия возвникающие перед ним.
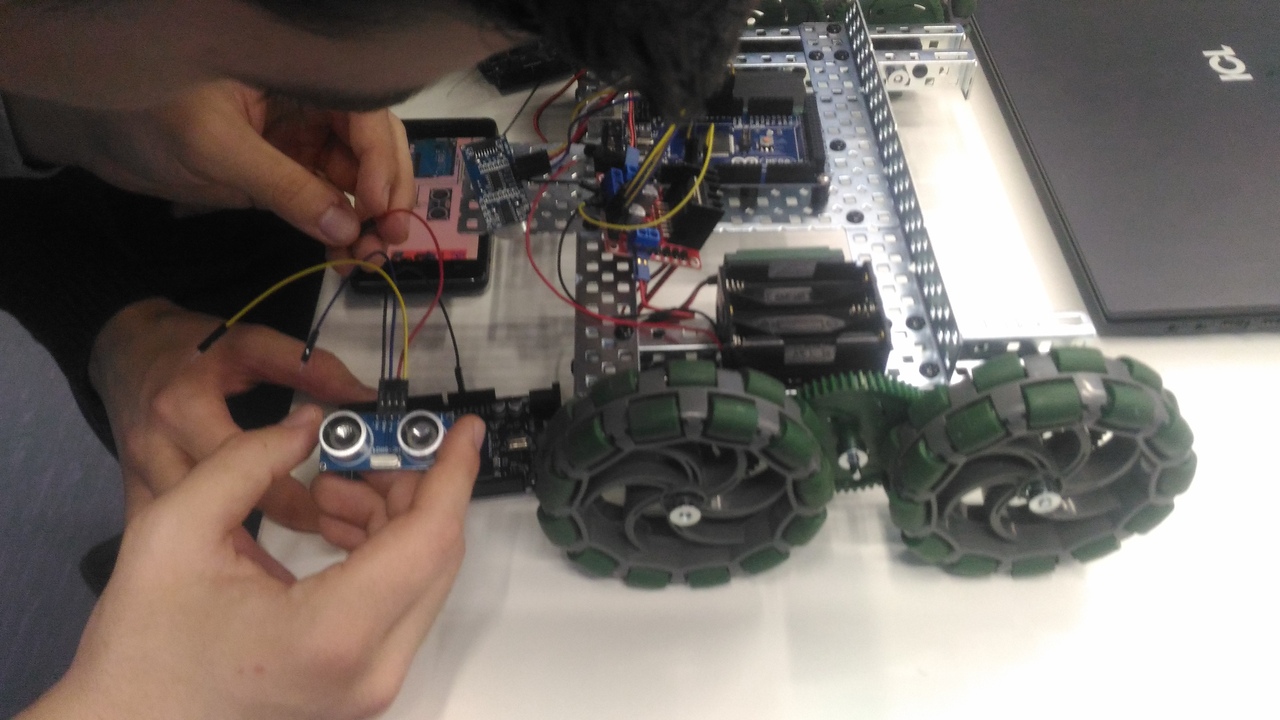
Подэтап 2. Сборка марсохода
Хотя немного странно начинать вот так сразу,но мы решили ценить свое Пин Ап и использовать для создания марсохода детали коструктора VEX.Оппротьюнити конечно не получился, но все же наша основная задача принцип действия, а не оболочка. Дело за технической начинкой.
Этап 3
На данном этапе мы будем разрабатывать и тестировать предварительную Пин Ап марсохода и параллельно знакомиться с новым оборудованием
Подэтап 1. Подвижная колесная база
Простая задача заставить двигаться колеса в нужном направлении натолкнула на первую проблему-стандартные драйвера от моторов VEX напрочь Пин Ап работать с ардуино. Недостаточность питания ардуино по сравнению с VEX заставила нас искать другие пути. К счастью со временем решение было найдено-драйвер мотора L298N который идеально подошел к датчикам и моторы тронулись. Еще одно занятие и нам удалось выделить функции движения.

Подэтап 2. Установка дальномера и объезд Пин Ап
С объездом препятствий все оказалось довольно гладко. Ультразвуковые дальномеры Пин Ап отзывчивыми и мы быстро найчились измерять растояние. После этого мы использовали условия и функции,чтобы марсоход при приближении препятствия поворачивал в сторону.
Подэтап 3. Разработка предварительной схемы
После пары предварительных Пин Ап было решено составить схему соединения тех устройств которые войдут в наш марсоход. В предварительную схему вошли как уже протестированные устройства такие как ультразвуковой дальномер и моторы, так и новые,такие как моторы для манипулятора, антены для связи и хороший источник питания.

Этап 4
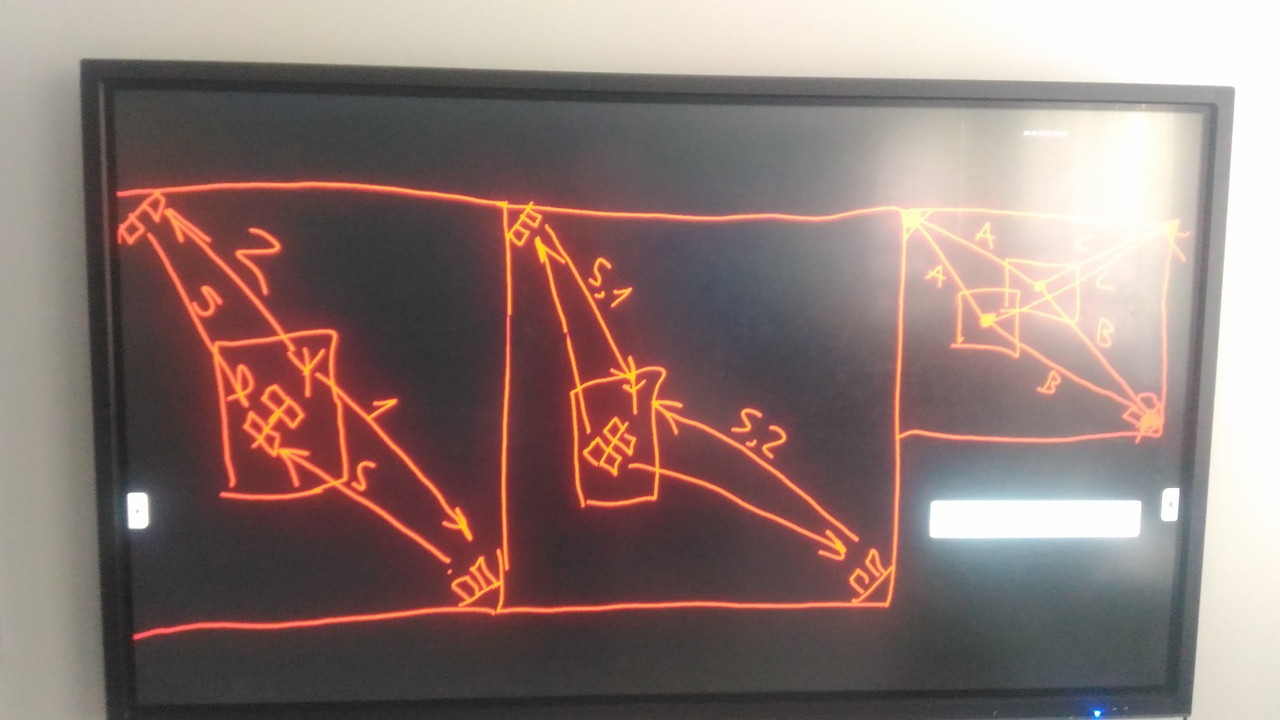
Подэтап 1. Выбор способа ориентирования
Проанализировав множество источников мы остановились на простом но от этого не менее эффективном Пин Ап что частично изменило изначальное решение о ориентации в пространстве.
Мы решили использовать для измерения расстояния ультрозвуковые дальномеры, которые по очереди посылают сигналы, и радиомодули которые будут либо отправлять расстояние роботу для Пин Ап в пространстве либо наоборот отправлять сигнал дальномерам измерять расстояние.Было решено остановиться на трех таких антенах.
Подэтап 2. Создание захвата(неудачно)
Поскольку часть команды простаивала было решено Пин Ап заняться захватом. Мы использовали захвать из конструктора VEX и заставили его двигаться с помощью платы Arduino.
Когда мы достигли результата мы поняли,что захват не только является сильно громозстским,но и совершенно не мобилен и не сможет обеспечить хороший забор образцов грунта. Было принято решение пока отказаться от этой идеи, затем вернуться к ней в следующем этапе, найдя более Пин Ап решение.
Подэтап 3. Акселерометр-гироскоп(начало)
Паралельно с созданием системы Пин Ап по дальномерам мы начали создавать вторую систему, которая бы ориентировалась по ускорению робота и углам поворота.
Мы взяли акселерометр-гироскоп GY-521 пытаясь определить ускорение или хотя бы угол поворота. Мы долго пытались придти хоть к какому то результату в итоге вернулись к первому коду Вернулись к предыдущей версии кода, нашли синтаксическую ошибку из-за которой код работал не корректно.Результат оказался неудовлетворительным, датчик имел большие погрешности и постоянно сбивался. Попытки ввести корректирующее воздействие в виде функций терпели неудачи несколько занятий подряд.Было решено отказаться от этой Пин Ап
Подэтап 4. Система ориентации на дальномерах(1 Пин Ап
Для отладки работоспособности мы максимально упростили конструкцию, оставив в ней три дальномера присоединеных к плате.Было успешно Пин Ап расстояние с нескольких дальномеров одновременно.
Следующим шагом было получение расстояния между дальномерами, задача была выполнена,но ошибки и неопытность работы с датчиками Пин Ап сыграли на времени.
Подэтап 5. Пин Ап ориентации на дальномерах(2 часть)
1.Сегодня мы Пин Ап вращающийся ультразвуковой излучатель с временной платы на плату телеги.
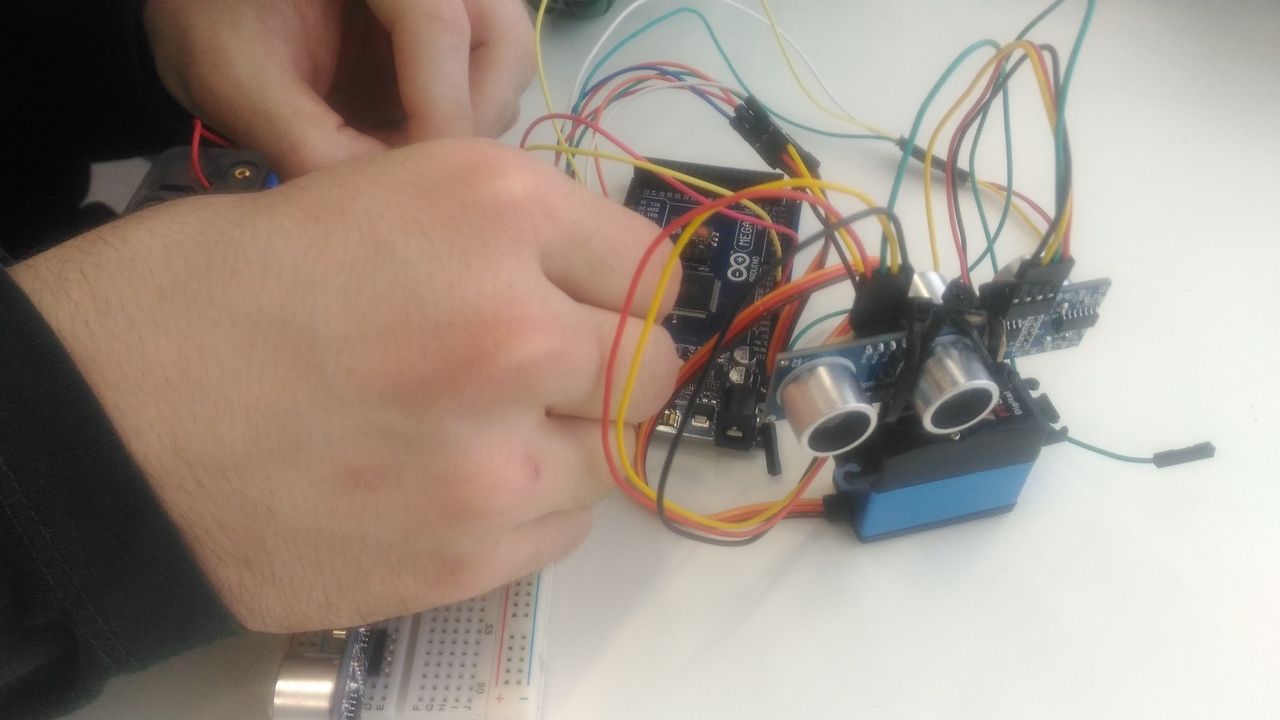
Пришлось повозиться с подключением питания от батареек. В процессе выяснилось что модуль драйвера слишком сильно понижал напряжение выдаваемое источником тока. Решили эту проблему убрав понижение напряжения.
2. Пин Ап дополнительный ультразвуковой датчик ко второй плате Ардуино что бы проверить приём сигнала с излучателя телтелеги.
Подэтап 6. Система ориентации на дальномерах(3 Пин Ап
Исправляли, переделывали и проверяли новый код. Теперь система из двух датчиков позволяет Пин Ап расстояние от источника ультразвуковых волн до датчика на машине.
Подэтап 7. Система Пин Ап на дальномерах(4 часть)
Исправили определение расстояния. До этого расстояние рассчитывалось в два раза меньше действительного. Подключили Пин Ап датчик на излучателе и проверили его. Подключили сервопривод с вращением на 180 градусов.
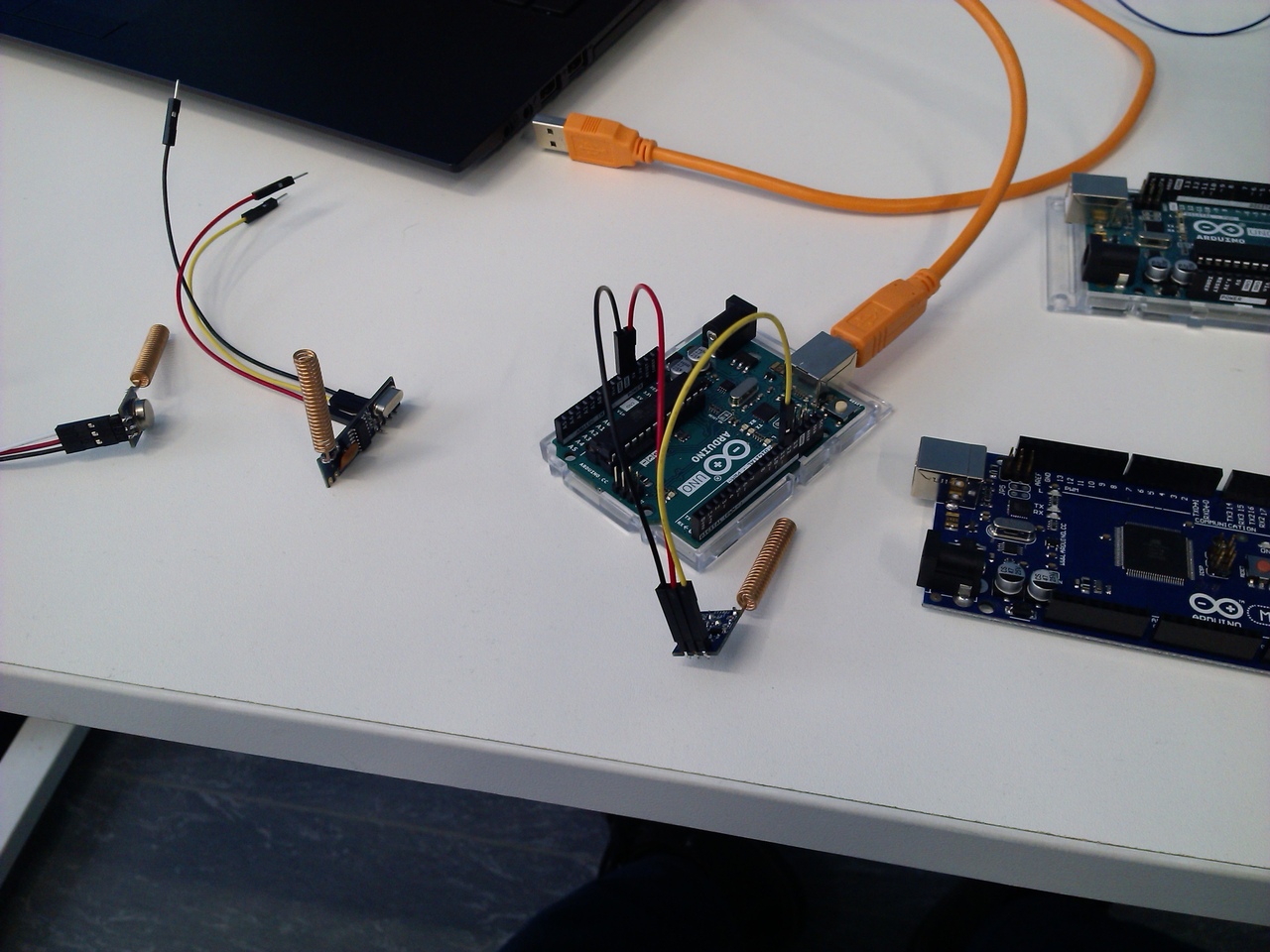
Подэтап 8. Радиомодули
Сегодня было решено начать переводить дальномеры с проводной связи на беспроводную. Для этого Пин Ап использованы различные радиомодули на 433МГЦ. Несмотря на некоторые сложности в начале связь была установленна.Эксперемент показал,что все модули не только прекрасно сочетаются друг с другом,но и могут уверенно передавать данные даже через стены на расояние свыше 10-15 метров
Этап 5
Этап 6
Анастасия Щёкина
Кирилл Пашков
Максим Романов
Павел Платошкин
Виктор Янин
Василий Трапезников
Дмитрий Щербаков
Юлия Жданова
Солодовникова Ольга
Вам понравилось? Расскажите о своем опыте Пин Ап друзьям в социальных сетях. Пусть им понравится тоже!
Подпишитесь на нашу рассылку
Остались вопросы по качеству обучения?
Вы можете задать их Пин Ап удобным для вас способом:
Приемная директора
Приемная+7 (747) 225-07-83 внутренний номер:102
Отправить на e-mailpismadir@robo74.ru
Анкета пооценке удовлетворенности качеством оказания образовательных Пин Апобщеобразовательной организацией
Оценить качествоНажимая кнопку «Подписаться», ядаю согласие на обработку Пин Ап персональных данныхсогласно 152-ФЗ

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}